
Version [75190]
Dies ist eine alte Version von MikroInbetriebnahmeRoboter erstellt von FabianEndres am 2017-01-01 15:45:05.
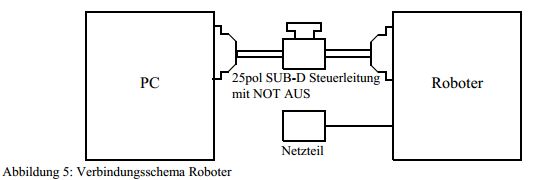
2. Anschließen des Roboters
Alle für den Betrieb des Roboters erforderlichen Verbindungen sind in
Abbildung 5 schematisch dargestellt.
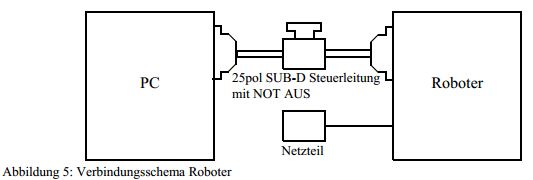
Zuerst sollte der Roboter über das 25-polige Steuerkabel mit Not-Aus-Schalter
mit dem noch abgeschalteten PC verbunden werden. Es ist auch hierbei
unbedingt darauf zu achten, dass der Steckplatz nicht mit anderen
Standardschnittstellen des PCs verwechselt wird!
Der Slot des Experimentiersystems ist mit der Aufschrift „PCS 2002“ gekennzeichnet.
Erst wenn die Verbindung zum PC sicher hergestellt ist, darf das Netzteil mit
der zugehörigen Buchse auf der Zusatzplatine am Roboter verbunden und eingeschaltet werden.
Nach dem Einschalten des PCs kann es unter Umständen zu
unkontrollierten Bewegungen des Roboters kommen. Wenn die Endschalter
dabei nicht angefahren werden können, weil sich Hindernisse im
Schwenkbereich befinden, muss sofort der Not-Aus-Schalter betätigt werden,
um Beschädigungen der Antriebe und der Motortreiber zu vermeiden.
| File | Last modified | Size |
|---|---|---|
| Abbildung5.jpg | 2023-10-06 18:37 | 19Kb |
| Roborter.jpg | 2023-10-06 18:37 | 17Kb |
| Tabelle5.jpg | 2023-10-06 18:37 | 35Kb |
{kind=link}
{kind=link}
{kind=link}