
Version [75181]
Dies ist eine alte Version von MikroAufbauExperimentLehrroboter erstellt von FabianEndres am 2017-01-01 15:34:21.
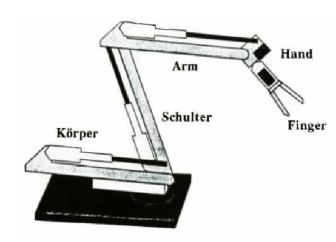
3. Der Lehrroboter
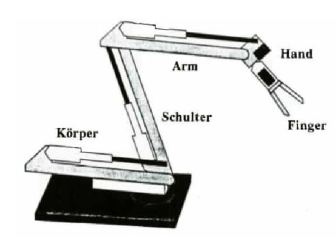
Abbildung 3: Lehrroboter
Bei dem in Abbildung 3 dargestellten Roboter handelt es sich um einen „teach
robot“ der Firma Kalms. Er wird mit sechs Gleichstrommotoren angetrieben.
Die Ansteuerung der Motoren erfolgt über die auf einer Zusatzplatine am
Roboter befindlichen Motortreiber IC`s L293B. Jeder Drehrichtung eines
Motors ist ein Portpin des Parallelbausteins 8255 zugeordnet. Ein Motor dreht
sich nur dann, wenn die zwei zugehörigen Ansteuerleitungen unterschiedliche
Signale führen. Die Motordrehzahl kann durch Ansteuerung mit PWM-Signalen
(Puls-Weiten-Modulation) variiert werden.
Zur Messung der zurückgelegten Wegstrecke befindet sich an jedem Motor ein
auf einem Hall-Element basierender Inkremental-Geber. Die Impulse der Geber
können über den zuvor als Eingang konfigurierten Port A des Parallelbausteins
ausgewertet werden. Die Ports B und C sind als Ausgabeports zu
initialisieren. (d.h. StdInit8255 kann nicht verwendet werden beim
Roboter)
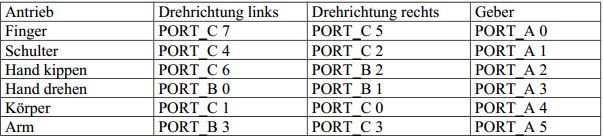
Tabelle 5 zeigt die Zuordnung der einzelnen Steuerleitungen.
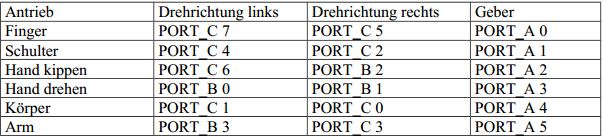
Tabelle 5: Zuordnungen von Steuerleitungen des Roboters
Labor für Mikroprozessortechnik 9Jeder der sechs Antriebe des Roboters verfügt über einen Endschalter für jede
Drehrichtung. Wird ein Endschalter angefahren, wird der zugehörige Motor
abgeschaltet. Die Ansteuerung dieses Antriebs ist jetzt nur noch in der
entgegengesetzten Richtung möglich.
Der Not-Aus-Schalter in der Steuerleitung des Roboters dient dem sofortigen
Abschalten aller Motoren.
| File | Last modified | Size |
|---|---|---|
| Roborter.jpg | 2023-10-06 18:37 | 17Kb |
| Tabelle5.jpg | 2023-10-06 18:37 | 35Kb |
{kind=link}
{kind=link}